
Moreno Salinas señala que las soluciones basadas en IA y ciencia de datos para los vehículos autónomos revolucionará sectores como la industria, el transporte o la investigación, dando nuevas oportunidades económicas
El profesor de la UNED puso como ejemplo la robótica marina. Así mencionó el sistema autónomo para la contención de vertidos marinos: SAVEMAR, compuesto por barcos de superficie, un centro de control de tierra y una plataforma de recarga y atraque automática, que permita que los barcos se desplieguen de forma individual o coordinada arrastrando una barrera u otros sistemas de lucha contra vertidos en una zona especificada mediante referencias geográficas precisas.

OURENSE, 12 de marzo de 2021.-El profesor David Moreno Salinas ha protagonizado la segunda jornada de la nueva fase del Seminario de IA que organiza la UNED en Ourense con el apoyo del Vicerrectorado de Investigación, Transferencia del Conocimiento y Divulgación Científica. Todas las sesiones se emiten desde el Centro de Intelixencia Artificial de Ourense, en su espacio Los viernes con IA. Moreno expuso que la IA está presente en multitud de aplicaciones diarias (móviles, programas, etc.) y es una constante en todas las noticias. Permite la transformación de múltiples áreas: laboral, industrial, agricultura, transporte, ocio… y citó como ejemplos la optimización industrial, análisis de la producción, diagnóstico médico, optimización producción agrícola, previsión de mercados, detección de errores, etc.
David Moreno explicó que se entiende por vehículo autónomo “aquel que imita las capacidades de manejo y control de un operario, percibiendo el entorno, estableciendo su situación en él, y realizando una navegación adecuada. Los vehículos autónomos son una realidad en múltiples áreas y campos” e indicó que hay perspectivas de uso en ámbitos como el coche autónomo, reparto con drones, agricultura, investigación, exploración, industrial, militar… “La IA y sus aplicaciones hacen que muchos de los retos y problemas presentes en los vehículos autónomos puedan ser abordados con nuevas perspectivas”, señaló Moreno, quien habló de “operaciones basadas en información recogida por sensores y algoritmos de IA (Ej. Recoger datos, planificar trayectoria y ejecutarla). Todas estas acciones pretenden sustituir las habilidades humanas por procesos de IA, pero aún hay muchas que requieren mucho trabajo”.
Existen numerosas áreas de trabajo que ofrecen múltiples oportunidades, y puso como ejemplo de aplicación de soluciones con vehículos autónomos la robótica marina. Así mencionó el sistema autónomo para la contención de vertidos en el mar: SAVEMAR. Se trata de un sistema autónomo compuesto por barcos de superficie, un centro de control de tierra y una plataforma de recarga y atraque automática, que permita que los barcos se desplieguen de forma individual o coordinada arrastrando una barrera u otros sistemas de lucha contra vertidos en una zona especificada mediante referencias geográficas precisas. Para ello se necesita un elevado número de sensores: gran cantidad de datos en tiempo real, algoritmos de IA + técnicas clásicas que proporcionen un comportamiento más seguro y eficiente.
Los retos complejos e importantes a superar son, según el ponente:
- Computación intensiva
- Tiempo real
- Restricciones de velocidad y memoria
- Consumo energético
- Latencia de comunicaciones
- Análisis y modelado
- Simulación
- Desarrollo del sistema, con software de control, software de tiempo real y hardware.
- Validación y verificación
Diseño: Embarcación, sistema de propulsión, sistemas adicionales, modelado matemático. Definición de los elementos necesarios para los vehículos:
- Sistema de Navegación Inercial
- GPS-IMU
- Sistema de Comunicaciones
- Motores timón y hélice
- Radar
- Sistema de Visión
- Sistemas de detección
- Sistema de arrastre de barrera
- Sistema de atraque y desatraque autónomo
- Radar para detectar obstáculos o embarcaciones.
- Visión artificial para atraque y desatraque.
- GPS-IMU.
- Sensores para detección de vertidos
- Señales de los motores, timón, revoluciones de la hélice.
- Objetivo: Encontrar el camino más seguro, más adecuado y más económico entre dos puntos A y B usando el conocimiento previo que se tenga y los datos que se estén recibiendo. Readaptándolo en caso de necesidad en tiempo real.
- Optimización de la trayectoria del vehículo
- Evitar obstáculos
- Coordinarse con otros vehículos
- Optimizar el uso de energía
- Posicionamiento del vehículo (GPS)
- Algoritmos de control
Coordinación de varios vehículos. Para poder controlar los vehículos de forma coordinada hay que tener en cuenta:
- Información de distancias disponibles para localización de múltiples objetivos
- Reducción de energía para el control de vehículos
- Limitaciones de las dinámicas de los vehículos
- Evasión de obstáculos
- Limitaciones de la comunicación inter-USVs (dependiente de la red)
- Conjunto de elementos flotantes
- Uniones flexibles
- Faldón de arrastre
- Fuerzas de arrastre en los extremos
- Fuerzas de ligadura e hidrodinámicas en los elementos
- “Nada hidrodinámicas”
- Mucha resistencia en una dirección y poca en la otra
Moreno Salinas señala que el modelado matemático es una etapa fundamental en la ingeniería y que la necesidad de modelos precisos es común en múltiples áreas y aplicaciones. Por ejemplo, para los vehículos autónomos, los modelos son necesarios para múltiples aplicaciones: simulación, planificación, estimación, control…
En robótica marina las pruebas experimentales son especialmente costosas en tiempo y dinero por el propio medio, por lo que disponer de modelos precisos ahorraría tiempo y dinero.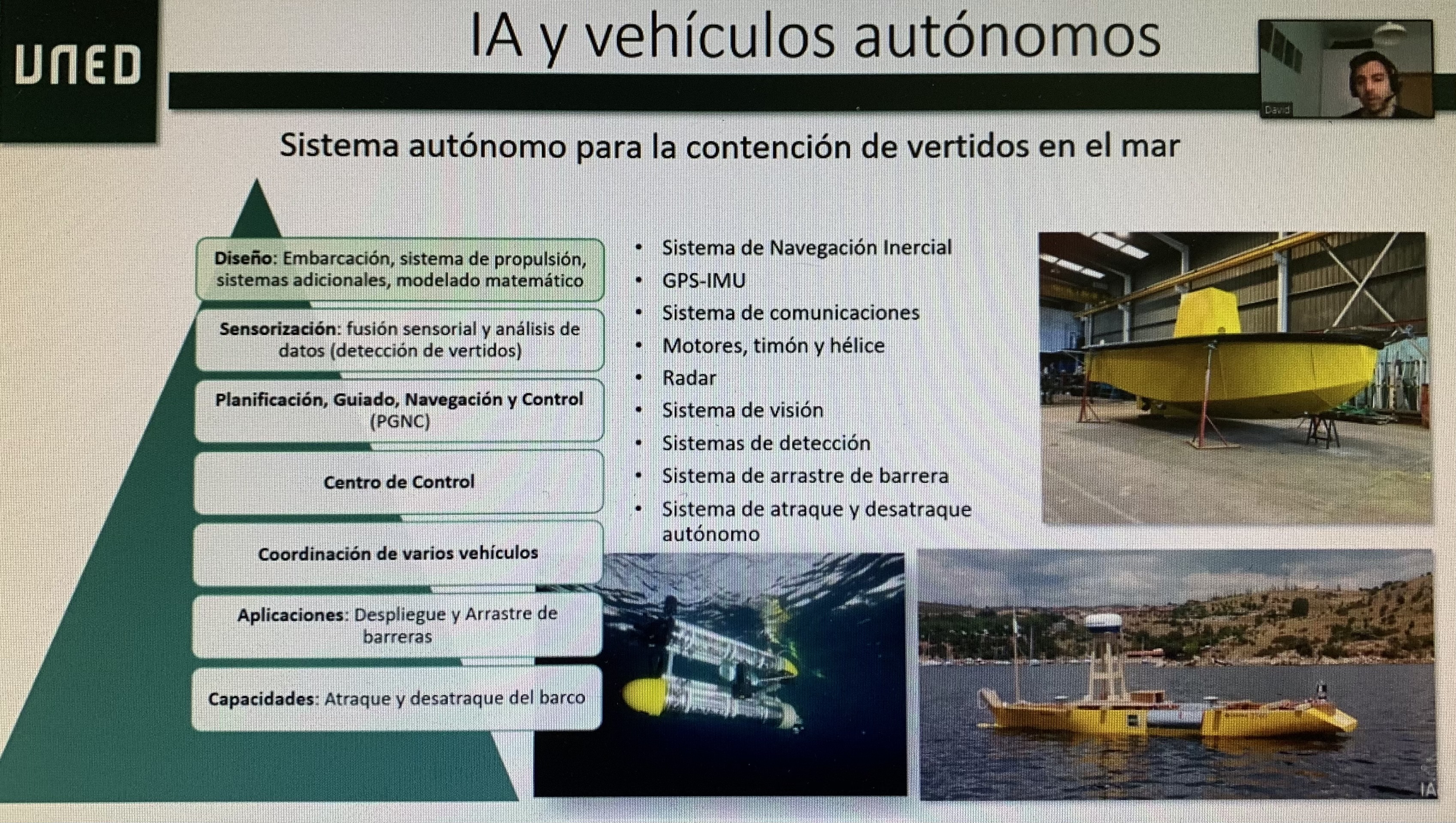
El ponente se pregunta por qué se habla tanto de modelado e identificación en vehículos autónomos y es que “el modelado y la simulación pueden llevarnos al 80% del esfuerzo de análisis. El modelo es una representación matemática de nuestro sistema, que permite analizar y simular el sistema teniendo encuentra que los modelos nunca son perfectos”.
El modelado a realizar depende del objetivo y así señala el ponente que un único sistema puede tener múltiples modelos, que hay gran cantidad de modelos disponibles en la literatura y que el desarrollo de un nuevo modelo desde cero es muy costoso y complejo. Los principales objetivos del modelado en ingeniería de control son analizar el sistema en detalle y realizar simulaciones detalladas y precisas.
Fue citando el desarrollo del modelo y su validación, la identificación de los parámetros del modelo como paso necesario, añadiendo que todo modelo debe cumplir unas características, es decir, que se debe asumir una estructura de modelo, recoger datos del sistema experimentos dedicados u operación normal y ajustar los parámetros para conseguir un buen ajuste.
Mencionó el modelado físico y el basado en datos. Del primero señaló que interesa la relación entre entradas y salidas, y las causas internas y fenómenos físicos que provocan esa salida. Se lleva a cabo una representación matemática del comportamiento físico del sistema, para comprender sus diferentes elementos, su funcionamiento y la relación que guardan las diferentes partes. “Buscamos una representación del sistema real”, indicó, para poder reproducirlo matemáticamente.
El modelado basado en datos es interesante por la relación entre entradas y salidas, no las causas internas que originan esa salida. “La identificación clásica requiere la realización de múltiples maniobras en condiciones ideales para cada uno de los parámetros hidrodinámicos de un vehículo, con el consiguiente coste económico y temporal”. Este modelado permite reducir el tiempo y el número de pruebas necesarias para el cálculo de modelos, reajustar los modelos físicos para las condiciones propias de cada vehículo y poder recalcular los modelos.
“Ambos tipos de modelado pueden beneficiarse de las técnicas de IA y de ciencia de datos para obtener modelos físicos con un número de pruebas en el primer caso, y para obtener modelos específicos y muy detallados para el sistema en cuestión en el segundo caso”, señala el ponente.
Ventajas e inconvenientes de ambos modelos: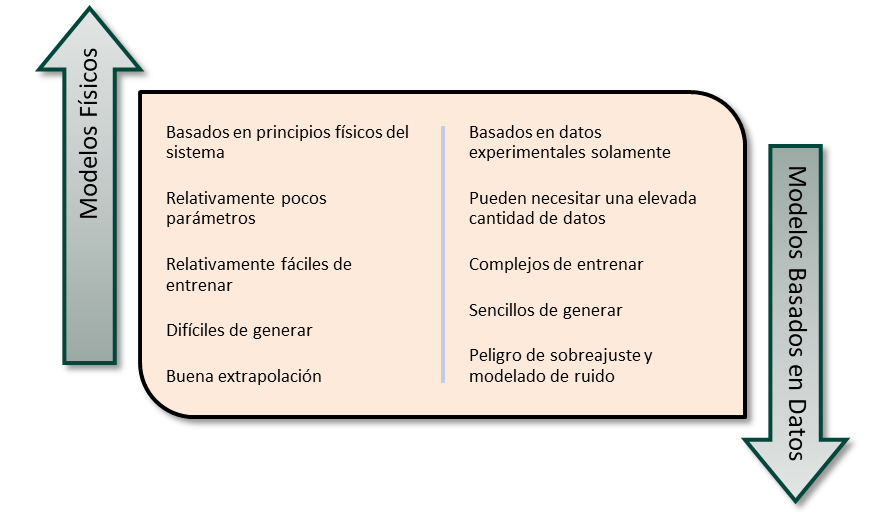
David Moreno menciona un modelado híbrido, que permita combinar el modelado físico con el basado en datos usando algoritmos de inteligencia artificial y ciencia de datos. Permitiría aprovechar las ventajas de estos dos modelados y combinarlos de manera que se solucionen las flaquezas de ambos. Así se pretende complementar el modelo físico del vehículo con términos desconocidos que permitan una mejor representación del comportamiento del vehículo. Así un mismo modelo podrá adaptarse, ajustarse y resintonizarse para nuevos sistemas o para cuando un sistema cambie su configuración.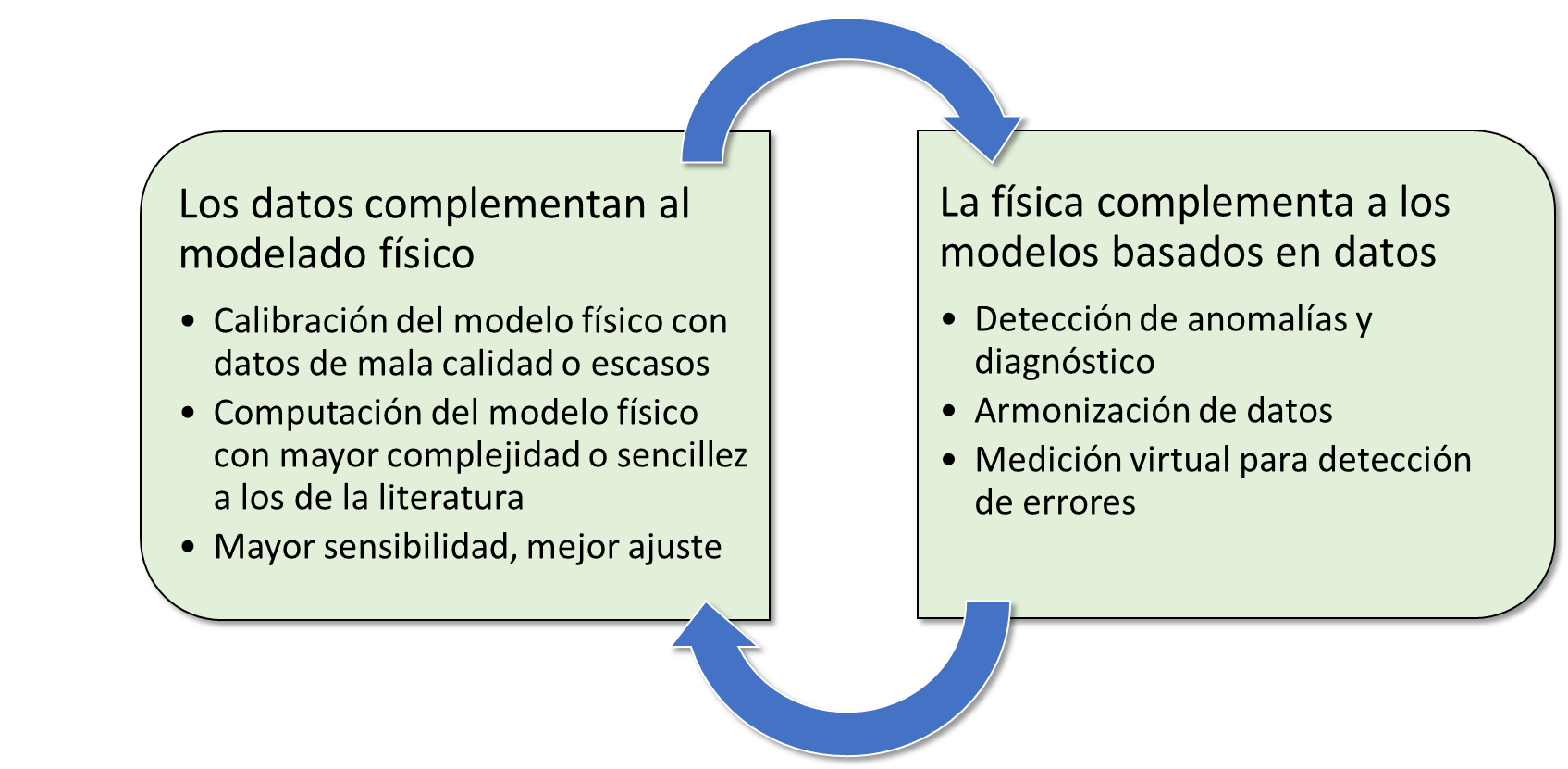
 El ponente citó el Proyecto Nautilus, en el que participan la Universidad Nacional de Educación a Distancia, (UNED); la Universidad Politécnica de Madrid (UPM); la Universidad de Málaga (UMA) y la Universidad de Las Palmas de Gran Canaria (ULPGC). El objetivo es el desarrollo de un enjambre de vehículos submarinos controlados por inteligencia artificial. Esto implica modelado e identificación de los vehículos submarinos, diseño de un marco de conocimiento del contexto para interaccionar con el entorno; integración de la electrónica desarrollada para las nuevas capacidades dentro de vehículos comerciales existentes así como el diseño e implementación de un sistema de posicionamiento, algoritmos de navegación basados en inteligencia artificial, y de comportamientos colaborativos basados en los principios de enjambres e IA, concluyendo con la validación experimental.
El ponente citó el Proyecto Nautilus, en el que participan la Universidad Nacional de Educación a Distancia, (UNED); la Universidad Politécnica de Madrid (UPM); la Universidad de Málaga (UMA) y la Universidad de Las Palmas de Gran Canaria (ULPGC). El objetivo es el desarrollo de un enjambre de vehículos submarinos controlados por inteligencia artificial. Esto implica modelado e identificación de los vehículos submarinos, diseño de un marco de conocimiento del contexto para interaccionar con el entorno; integración de la electrónica desarrollada para las nuevas capacidades dentro de vehículos comerciales existentes así como el diseño e implementación de un sistema de posicionamiento, algoritmos de navegación basados en inteligencia artificial, y de comportamientos colaborativos basados en los principios de enjambres e IA, concluyendo con la validación experimental.
El objetivo del grupo G13 de la UNED es la identificación y modelado de los vehículos marinos, llevando a cabo la identificación usando técnicas y modelos existentes en la literatura, desarrollando nuevos modelos mediante técnicas de la ciencia de datos; desarrollo de técnicas online y en tiempo real de reajuste y computación de modelos matemáticos así como el desarrollo de sistemas de detección de errores en tiempo real, para reajuste de los sistemas de control, reajuste de los parámetros de los modelos y recuperación segura de los vehículos.
Los retos adicionales de la IA para aprovechar el modelo híbrido son los siguientes: respuesta en tiempo real, complejidad computacional, precisión y fiabilidad; seguridad y cuestiones éticas.
Por último, David Moreno Salinas expuso que las soluciones basadas en IA y en ciencia de datos dentro del campo de los vehículos autónomos “van a revolucionar múltiples campos como en industria, transporte, investigación, etc., y que van a proporcionar nuevas oportunidades económicas”.
“Estas soluciones pueden ser aprovechadas dentro del modelado de vehículos para desarrollar nuevas aplicaciones y ofrecer soluciones a retos no resueltos, como los modelos híbridos para sistemas de control inteligentes, detección de errores, mantenimiento predictivo o incluso sistemas de recomendación, ofreciendo una gran cantidad de oportunidades para trabajar y un campo fascinante de investigación”.
Ver la intervención de David Moreno Salinas
El Seminario de IA de UNED Ourense vuelve el viernes, día 26 de marzo, con la intervención del profesor doctor de la UNED, Andrés Duque Fernández, quien disertará sobre Traducción automática. Evolución histórica, aproximaciones actuales y desafíos abiertos.
 UNED Ourense
UNED Ourense
Comunicación

